Hello All,
Just need some feedback on my approach for Nengo implementation here.
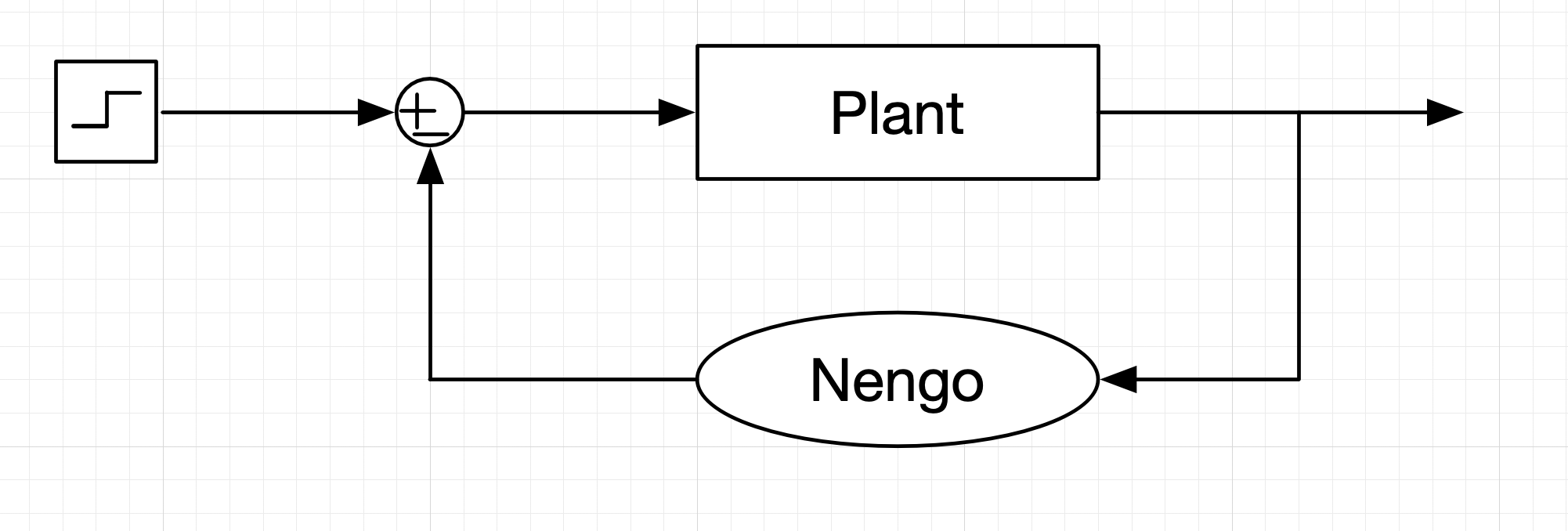
I am working on implementing an adaptive control for DC motor using Nengo.
What I really want is to somehow use nengo in the loop with Matlab Simulink. Below is the image to make this more understandable.
Any ideas on how to approach this will be super helpful. Thank you all.
xchoo
October 22, 2020, 2:51am
2
Hi @ppatel26 , and welcome to the Nengo forums!
It’s been a while since I’ve used Matlab, and I do not have access to a recent version of it, but from my research, it looks like Matlab (and Simulink) have a Python API (see this article: https://www.mathworks.com/products/matlab/matlab-and-python.html , and this API documentation / examples: https://www.mathworks.com/help/matlab/matlab-engine-for-python.html ), and this is all you need to interface with Nengo!
Within Nengo, you can run any arbitrary Python code using the nengo.Node , and we have an example here (from our Nengo online documentation ) that illustrates how to use a Nengo node within a Nengo model.
If you have any further questions, don’t hesitate to post a reply!