Good time of day,
I’m trying to learn dynamical systems that saturate value and when it goes to 0 resets. This should be a continuous process. I tried to use more neurons and play with synapse and radius, but it doesn’t work. Am I missing something?
Here is snipped that reproduce behavior
import nengo
import numpy as np
import matplotlib.pyplot as plt
tau = 0.01
def feedback(x):
x = x + 0.0005
if x > 1:
return 0
return x
model = nengo.Network(seed=42)
with model:
state = nengo.Ensemble(2000, 1, radius=np.sqrt(2))
nengo.Connection(state, state, function=feedback, synapse=tau)
state_probe = nengo.Probe(state, synapse=tau)
with nengo.Simulator(model) as sim:
sim.run(5)
samples = len(sim.data[state_probe])
x = sim.data[state_probe][0]
points = [x]
for i in range(samples-1):
x = feedback(x)
points.append(x)
points = np.array(points)
plt.plot(range(samples), sim.data[state_probe], label="x1", alpha=0.8)
plt.plot(range(samples), points, color="r")
plt.show()
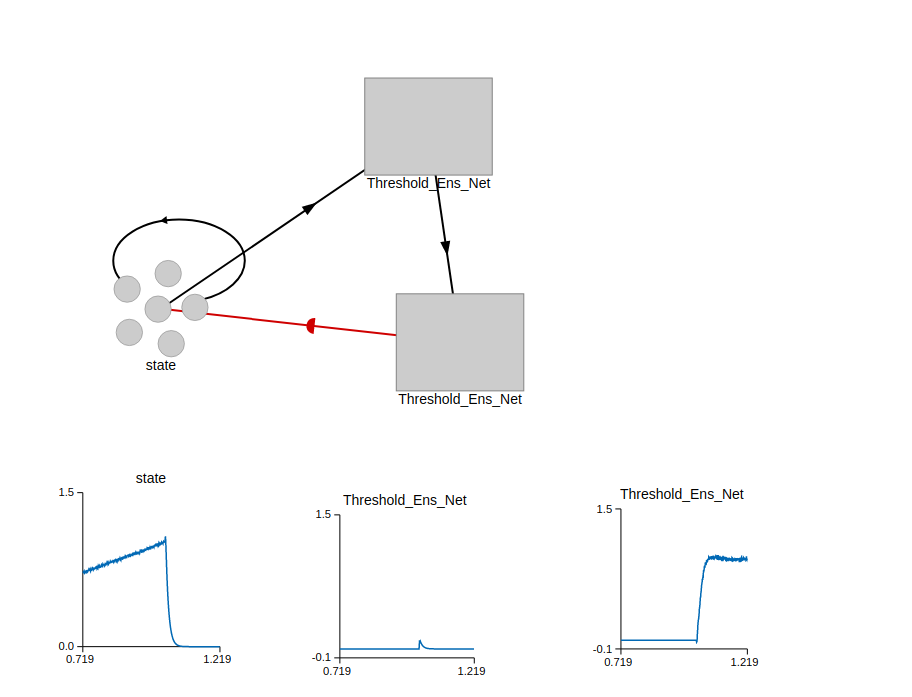
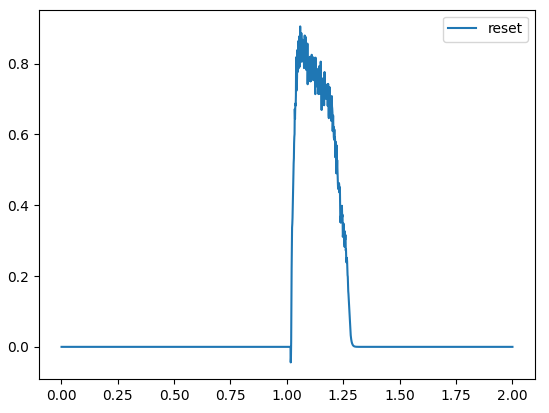
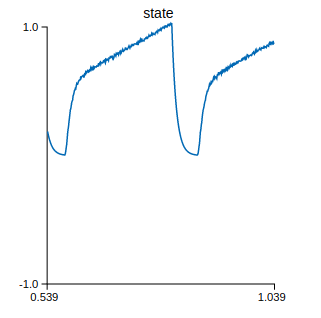
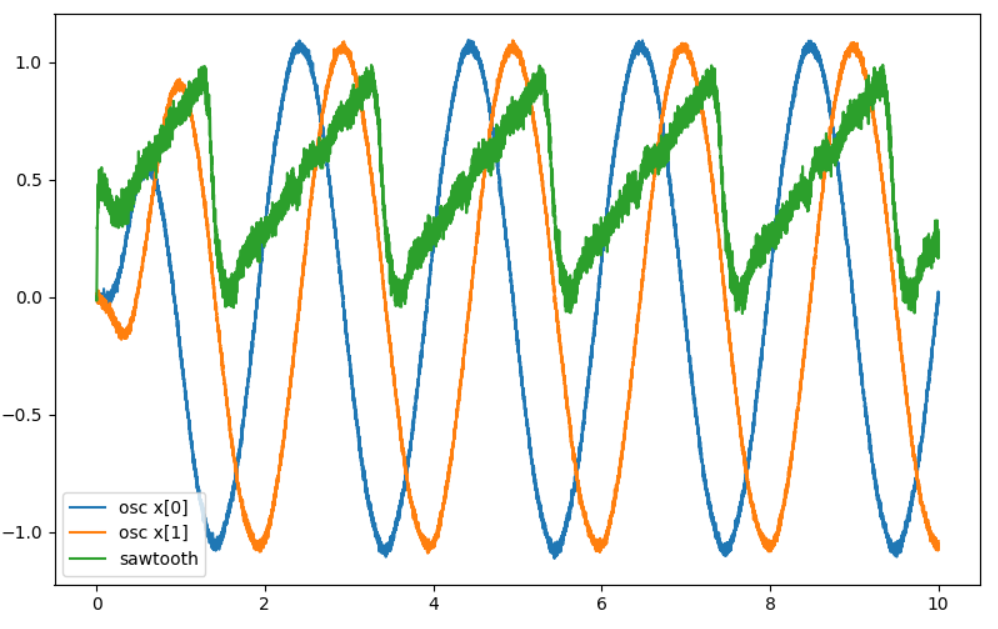
Resulted plot
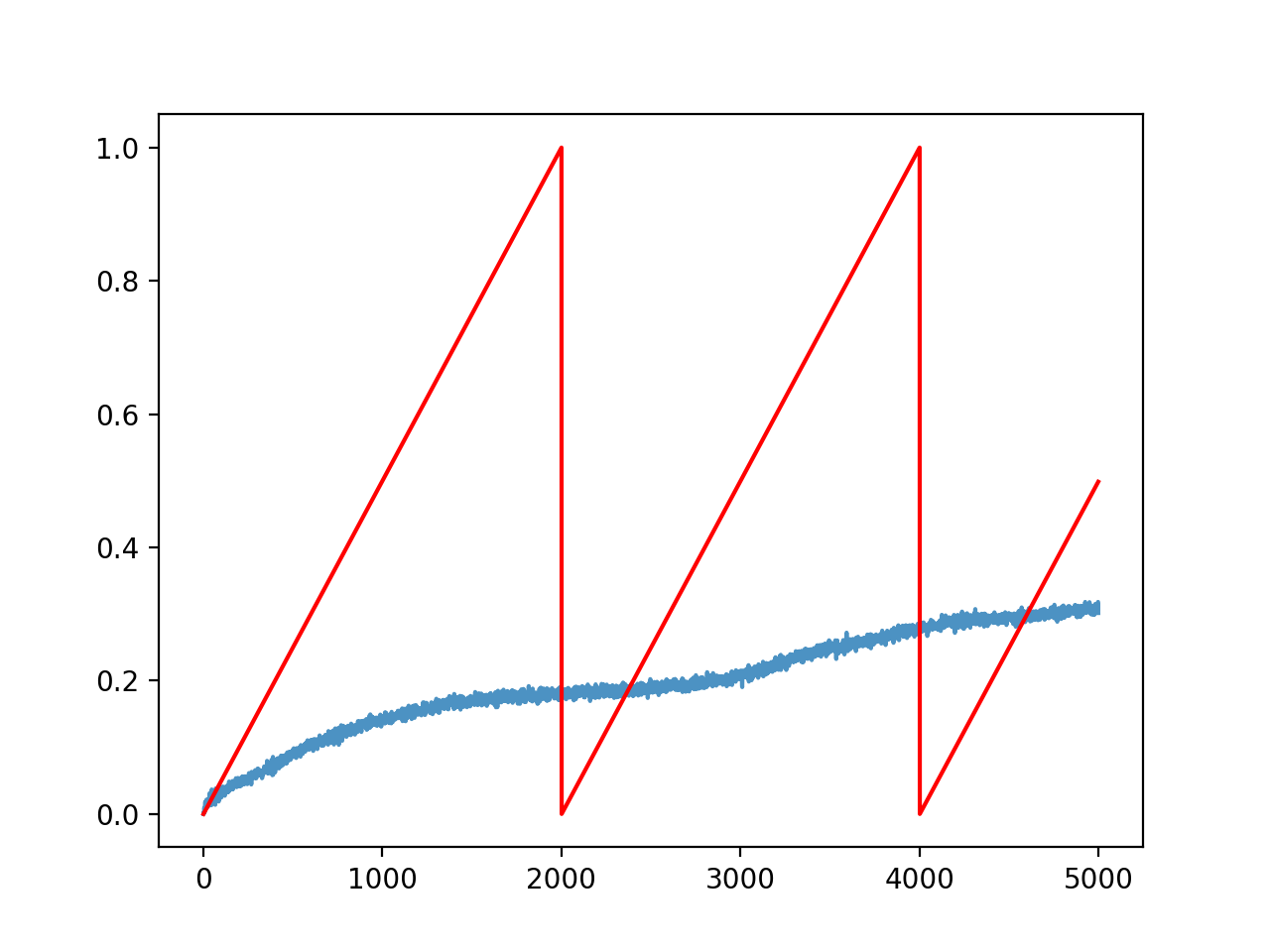
Basically I want blue line match red line
Thank you for any input